一、引言
金属制品是冶金工业中的重要一环,但在我国该行业却是一个薄弱环节,机械、电气设备陈旧,阻碍了行业的发展。在金属加工中,滑轮式拉丝机是常见的一种,广泛应用于钢丝,钢缆,建筑构件,镀锌铁丝,金属网,制钉等拉丝现场。在以前通常都采用工频实现,现在随着工艺技术的进步和变频器的大量普及,变频控制开始大量使用,并可实现无级调速,相应的逻辑控制以及张力工字轮收卷等功能。
采用变频调速系统的直进式拉丝机技术先进、节能显著,调速范围在正常工作时为30:1,同时在5%的额定转速时能提供超过1.5倍的额定转矩。
本文以杭州某生产铁丝的滑轮式拉丝机现场为例,来说明变频控制的应用过程和效果。
二、工艺介绍和要求
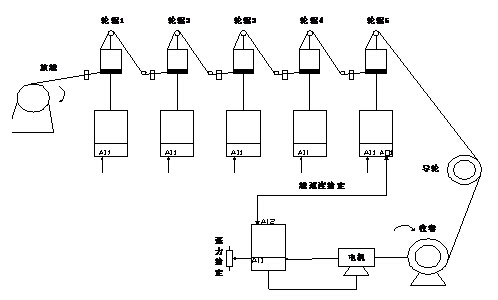
该设备主要对铁丝进行牵伸拉拔,进线6.5mm,经过5道拉拔模具的作用,出线3.2mm,拉丝部分共有5个直径550mm的转鼓,相邻转鼓之间安装有用于积放线的滑轮,可以解决前后两级之间速度差造成的张力不稳定,达到每级之间的张力控制。收卷电机工字轮收卷,通过拉拔最后以及与收卷之间的张力摆臂调整收卷的速度,通过PID来调整由于卷径变化引起的速度差,以达到张力收卷的效果。其主要要求如下:
1.各台速度通过电位器单独可设
2.各台都可单独启动,也可系统总启动
3.系统具有总停止和紧急停机功能
4.前面一台停止后,后面台位必须停止
5.收卷能够恒张力收卷
6.加速和减速平稳,没有大的波动
三、系统方案
1、系统配置方案
主拉:采用E380系列通用型变频器,具有输出力矩大,性价比高等优点;
收卷:采用V560系列高性能矢量变频器,实现张力收卷功能;

2、方案介绍
拉拔部分直接通过模拟量电位器给定变频器的频率,通过机械本身的积放线功能进行调整,以达到张力保持的效果,收卷部分采用高性能矢量变频器双通道频率作用,PID做微调来修正由于卷径变化引起的速度变化,以到达张力控制。
3、方案控制逻辑
每一台可以单独启动,停止,如果达到系统启动停止位置时,第一台先启动,只有第一台启动后,才会启动第二台,第二台启动后,才会启动第三台,依次往后;系统停止,第一台停止后,后面都停止,
四、系统图示及调试
1、系统接线图(部分图示,如图1)
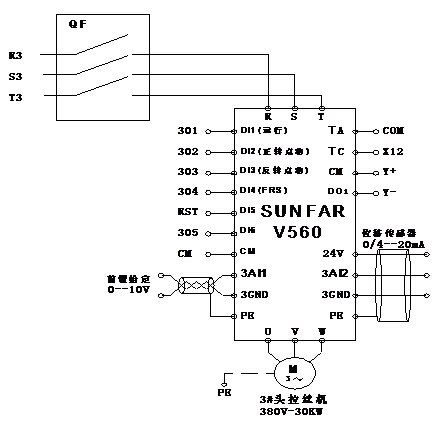
按系统接线图接线,并重点检查变频器的电源接线部分,完成检查后上电。
拉拔部分按接线图和所给定参数设置变频器参数后,收卷部分如下
2、调试参数
拉拔变频器参数设置(部分)
F0.1=4 VC1模拟量给定频率
F0.4=1 控制方式为端子控制
F0.5=2 三线控制方式
F0.10=20 加速时间
F0.11=20 减速时间
F3.0=18 X1为三线控制模式
F3.1=16 EMS自由停机控制
F3.8=0 继电器输出为变频器运行中
F3.6=16 变频器故障输出
收卷变频器参数设置(部分)
F0.1.16=13 频率设置值为两个通道设置值之和
F0.1.19=0.15 通道2设定系数为15%
F0.3.33=1 控制方式为端子设定
F1.0.03=2.00 加速时间为2S
F1.0.04=2.00 减速时间为2S
F1.0.09=5.00 点动加速时间为5S
F1.0.10=5.00 点动减速时间为5S
F5.3.28=0007 频率设定通道为最高优先级
F7.0.00=2001 过程PID为启动投入
F7.0.08=60.0 PID设定值
F7.0.10=1 PID反馈为AI2
F7.0.17=0.55 过程PID的P值
F7.0.18=20.00 过程PID的I值
F7.0.21=0010 过程PID输出双极性
F7.0.22=0.0 PID的静态偏差为0
3、调试步骤
(1)电机参数自学习
在按电机实际参数设置【F2.0.00】~【F2.0.04】后,设置【F2.2.53】=1启动静态自学习;
(2)电机参数学习完成后,按以上调试参数设置参数;
在以上调试工作准备完成之后进入调试
(3)调整气缸摆杆传感器的最大值和最小值。范围越大,调整的精度就越高,调整的效果越好。通过D1.0.04来监控调整,在调整完成之后,分别修改对应AI2对应最小值【F4.0.02】和最大值【F4.0.03】
(4)气缸摆杆校正完成之后,在没有穿线之前,分别对从第一台到最后一台的点动,查看每一台的刹车装置和皮带轮是否装好;
(5)调试过程最重要是调试PID限幅比例和PID的P值和I值。I值调试的经验是I值大于收卷加减速时间,小于拉拔加减速时间。根据空盘和满盘的卷径来计算PID的限幅值
五、小结
在本方案中,收卷部分采用四方高性能矢量变频器V560的驱动,拉拔部分E380通用型高性价比变频器,在系统参数优化后,启动停止非常平滑,稳定运行并大大减少了断线率。相比工频驱动系统,效率和节电率也大大提高。而且本系统中电气器件配置简练,逻辑清楚,便于故障检查,完全满足新型滑轮式拉丝机的工艺要求,得到了客户的好评。
