智能驾驶的快速发展离不开感知系统性能的提升,同时感知系统性能的优劣也制约着智能驾驶方案的实际落地。在感知系统研发过程中,每时每刻都需要进行性能检测评估以了解不同感知系统自身性能的优劣,实现取长补短,缩短研发周期。因此如何对感知系统性能进行测试评价、如何根据感知系统的不同特性实现针对性地测试评价、如何根据感知系统测试评价结果提供行之有效的改进方案是未来智能驾驶感知系统发展的关键所在。
经纬恒润推出的感知系统性能评估分析解决方案可以根据感知系统(不同数量的传感器、不同类型的传感器、各传感器组合等)和测试环境(城市、乡村、高速路、地下车库等)的不同制定相应的评估分析解决方案,同时可针对感知系统特定性能实现定制化测试评估,此外根据测试评估结果可提供相应感知系统优化指导方案。
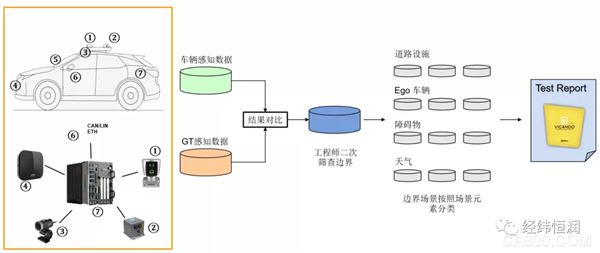
感知系统评估分析流程
感知系统包含了多种不同类型的传感器以及获得的感知数据,以充分利用各类传感器对于目标及环境的感知能力来获得可靠的感知信息,同时还须考虑感知系统边界及极限情形,比如传感器本身的能力边界、特定环境或场景下对于信息的获取、感知算法的鲁棒性、Corner Case及Edge Case的覆盖情况,甚至还得考虑行业标准体系,如SOTIF预期功能安全等。
仅以视觉感知举例,相比其他环境感知技术具有以下几点优势:
• 视觉感知图像信息量大,包含的运行环境细节特征丰富;
• 视觉感知图像对环境信息探测范广,能够获取足够的运行环境信息;
• 视觉感知图像获取途径方便,主要利用摄像机采集图像,设备调节简单、易操作;
• 图像采集设备相比其他环境感知设备更加经济实用,且维护费用低。
目前在视觉感知领域,常采用机器学习或深度学习的方式来实现目标识别,训练数据集的质量以及包含的信息量对于机器学习算法来说是非常关键的,能够决定神经模型训练过程中神经网络的各层参数如何变化。一个深度神经网络的成与败,主要还是取决于输入数据的质量。在实际应用中采集无标签数据通常比较容易,但是获取样本的类别标签要困难得多,人力物力成本主要集中于对数据进行标注的过程。对无标签样本进行标注所需的人力成本成为制约有监督学习的瓶颈。主要存在的数据问题包括:
• 数据不足:数据量的多少主要取决于使用案例、数据类型,以及预期结果;
• 数据质量:解决不同的问题需要不同的信息,目前缺乏场景化、高质量的数据;
• 数据标记:标记是数据的能量源泉,机器学习模型要求数据被标记。
因此,需要建立一套提升基于AI的视觉感知软件验证效率和安全性的工程解决方案,有效解决人工智能视觉感知系统面临的数据问题。
为了更有针对性地选择有标签样本,降低对样本进行标注所需要消耗的人力成本,研究者们提出一系列方法,让机器主动地挑选有价值的数据样本用于学习,即主动学习。

基于云端部署的感知算法验证套件
除了算法层面需要给予更多地关注和验证,从传感器层面也需要作更多地考量,目前智驾感知层面,主流的环境感知系统是通过摄像头、毫米波雷达、激光雷达和超声波雷达等多传感器获取运行环境信息,但随着自动驾驶功能复杂性及环境、道路适应性的不断提升,单纯靠增加传感器的数量或类型,不足以解决感知端的复杂需求,还可能带来更多的设计及可靠性问题。而目前,在行业中,也积极在探索更复杂传感器或多传感器融合的解决方案,比如激光雷达与视觉的融合、毫米波与视觉的融合等。
以毫米波雷达为例,目前广泛应用的77GHz毫米波雷达具有作用距离远、测速精度高、受天气影响小等优势,但也存在角度分辨率低、虚警和误报严重、同频雷达干扰等缺点。尤其是L3以上级别智能驾驶系统对雷达传感器提出了更高的要求,如高角度分辨能力、类激光雷达的点云目标输出、强抗干扰等。因此,研究和开发分辨率高、目标识别能力强、抗干扰性能优越的新一代毫米波成像雷达产品是大势所趋。
由Arbe Robotics公司自主开发的雷达芯片组解决方案—“Phoenix”,通过识别、评估和响应具有挑战性的场景与4D超高分辨率实时成像,无论周围的天气和光照条件如何,Phoenix都能区分真实的威胁和虚假警报。
Arbe 4D毫米波雷达因其采用了天线芯片设计,可以得到更精确的点云数据。其探测距离可以达到300米,同时高程分辨率可以达到2°,即可以通过对点云的算法来进行障碍物分类,同样可以解决雷达在卡车识别,经过桁架,桥梁时出现的探测问题。
• 高分辨率:1°横向分辨率 & 2°纵向分辨率
• 广探测区:100°水平方向 & 30°纵向
• 长距:0.5m - 300m 探测距离
• 高实时性:30FPS(4D模式下)
• 高距离分辨率:7.5cm – 60cm
• 多普勒分辨率:0.1m/s
• 误报:不存在
• 调制方式:调频连续波技术 ( FMCW )

Arbe 4D毫米波雷达