随着全球化趋势发展,国产机器人迎来挑战与机遇,我们必须保持技术的创新与领先,确保技术理念和方向的正确性。
据第三方数据报告显示,2023年,埃斯顿在中国市场的机器人出货量位居国产化品牌第一,埃斯顿始终坚持系统级正向研发,向高精度、重负载、全品类体系拓展,带领国产机器人品牌迈上新的台阶。
系统级正向研发平台将成为核心竞争
埃斯顿自动化一直坚持独立正向的研发战略,区别于传统研发平台,埃斯顿将一切技术建立在客户需求基础上,即由客户需求转化为产品需求,进一步转化为技术方案,率先实现了机器人控制器、伺服系统、本体设计的全方位布局,机器人核心零部件自主率达到95%以上。
埃斯顿采用紧耦合的产品开发模式,准确理解并通过技术手段满足用户的显性需求,同时引导用户的隐性需求,为其带来更好的使用体验。这一切需要多学科协同作业,将每一个部件的性能发挥到最大。

紧耦合模式竞争力:
机器人核心解决方案
埃斯顿遵从一切以客户需求为导向的目标,持续加大机器人研发投入,不断革新运动控制技术。研发的新一代机器人控制器,将运动学与动力学算法再次升级,同时开发了系列高级运动功能。依据工业机器人应用属性,研发全新机器人编程语言,支撑客户特定功能拓展和工艺秘密保护。根据客户需求,从行业/应用的角度出发,针对性开发对应的工艺软件包以及配套的工具软件,大幅提升产品易用性。
1、运控系统升级
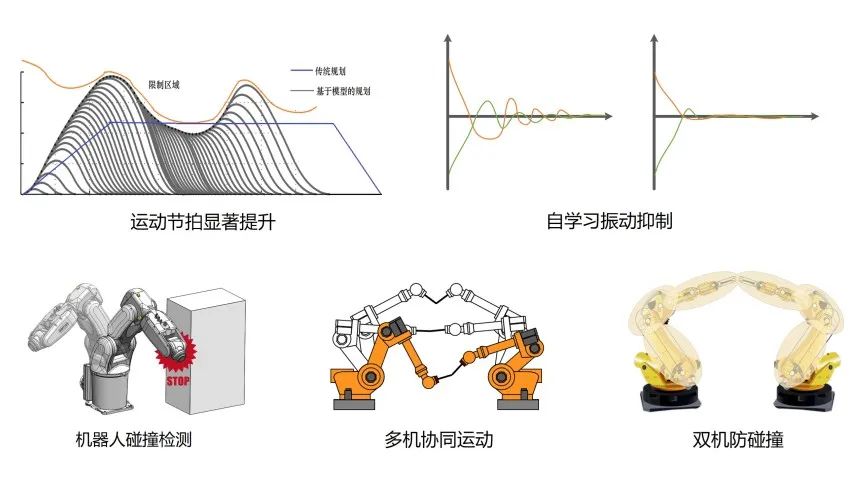
基于精准的模型辨识、学习技术和高级运动算法,埃斯顿提供了更为完善的机器人运动控制解决方案,不仅在速度、精度、抖动抑制、碰撞检测灵敏度等多个方面对机器人的性能进行提升,而且在多机联动、通讯控制、动态跟随等复杂场景下提供完善的解决方案,使机器人的应用场景得到极大的延伸,在码垛、焊接等传统行业的应用中竞争力更强,也在新能源、汽车、3C电子等行业里给客户提供了一个强性能、高可靠的选项。
2、全新编程语言
埃斯顿全新一代机器人编程语言,具备高效的执行、稳定的运行、丰富的功能库、完备的加密保护和强大的拓展性等优势,提升应用场景的生产运行效率,实现工艺技术秘密保护,方便客户针对特定需求、行业进行功能拓展和定制。
3、定制应用工艺
工艺软件包根据行业/应用的特点,将调试过程中与工艺无关的部分尽可能地标准化封装,设计专用的界面和指令,大幅降低调试人员的调试难度,提升调试效率。目前已完成的工艺软件包覆盖点焊、涂胶、焊接、码垛、冲压、木工、视觉等多个行业与应用场景。
4、辅助工具软件
工具软件在机器人应用中主要承担选型评估、编程、配置、仿真、维护、诊断、二次开发等功能,覆盖机器人应用的前中后段。目前埃斯顿机器人已推出在用的机器人工具软件包括:ERLOAD(负载评估软件)、EstunEditor(编程配置及仿真软件)、EstunWorkstation(界面二次开发软件)、Autolist(折弯离线编程软件)、Escope(监控软件)等。
5、专用伺服系统
埃斯顿机器人伺服依托于国产通用平台,以客户需求为中心,以节能减排为准则,针对性、差异化地开发机器人专用伺服系统,并体现在电控柜的规划与开发上:纵向结合机器人功率等级、机器人型谱,统筹电控柜与本体搭配;横向结合产品认证,多种配置产品策略,正向级开发型号最少的电控柜覆盖全系列的机器人产品。
6、本体研发技术
埃斯顿机器人本体作为机器人系统的执行单元,拥有成熟的选型设计基础,形成有效的判断标准及加速寿命测试方法。在机械臂的结构设计方面,建立有效且经过测试验证的机器人整机有限元、模态分析及全柔性体模型的动力学分析方法。通过对先进新材料的探索积累,以及零件结构拓扑优化、尺寸优化等技术研究,建立了先进的机器人产品轻量化设计方法。
埃斯顿机器人,依托本体及关节模块化、高性能机器人专用伺服以及新一代机器人控制器,充分发挥各个核心零部件的性能,挖掘机器人的最大潜力。
埃斯顿机器人新内核:
全品类、高精度、重负载、场景化
1、全品类机器人
覆盖3-700kg76款机器人

埃斯顿拥有3-700kg负载范围的76款机器人,在光伏、锂电、金属加工、汽车、3C电子、包装、建材家具、工程机械等细分行业拥有头部客户和较大市场份额,基于自动化核心技术,驱动机器人朝向全品类、场景化方向发展。
2、全新UNO系列机器人
满足高精高速应用场景

埃斯顿机器人面向汽车、电子、锂电、光伏等头部行业,结合高要求关键应用场景的痛点,定义开发了全新UNO系列产品。UNO系列产品以应用场景化为主导,全场景覆盖为目标,攻克关键工序应用场景,结合“机器人+”,提供机器人完整解决方案,高性能、多功能,打造国产机器人新高度。
目前,市场上工业机器人的高精度应用主要涉及钻孔、打磨、涂胶、点焊、弧焊、激光切割等场景,自学习、视觉控制、仿真离线编程取代示教编程,这些发展方向都对机器人位姿准确度提出了更高要求。埃斯顿正向研发全新UNO系列机器人,开发自主动力学模型,赋予机器人“智能”了解实时运行状态的能力,在运行过程中,根据各项动力学相关参数,自动进行最匹配的轨迹规划和运行姿态,充分发挥机器人的最佳性能,显著提高机器人的节拍和运动稳定性,特别在运动轨迹复杂的相关领域,其精准程度要大幅超越传统机器人。
3、重负载机器人
打造精密、高效、柔性化产线
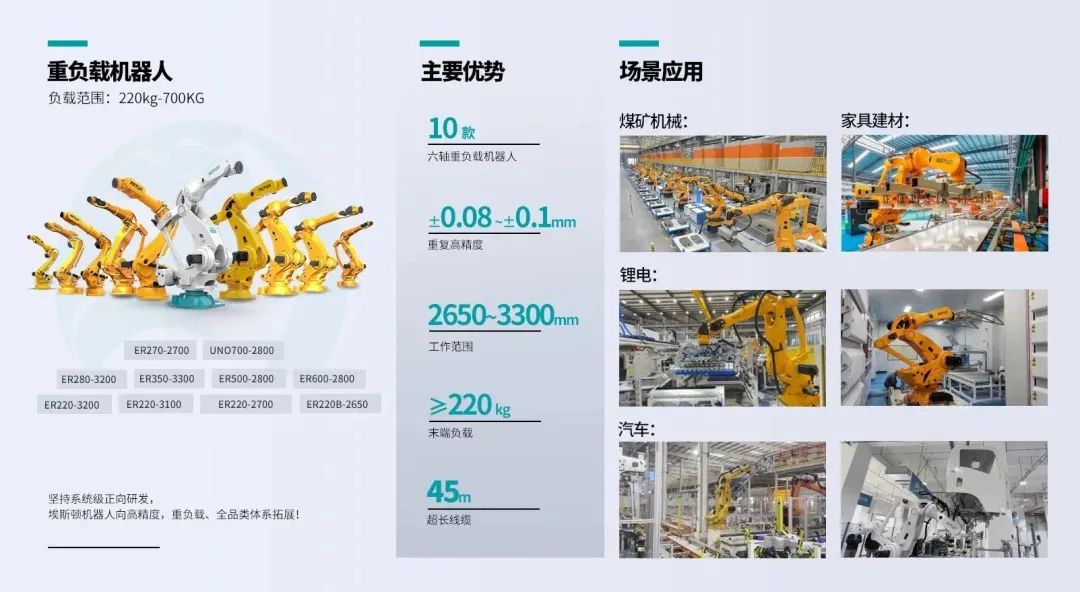
随着重负载机型的应用需求增多,其市场增量潜力巨大,助力客户进一步实现产线自动化,提高了生产效率及产品合格率,同时改善了作业人员的工作环境。
针对锂电、光伏、汽车、装备机械、家具建材等行业工艺需求,埃斯顿拥有220~700kg的10款重负载机器人,满足各类复杂场景应用。针对精度、运动性能和安全控制能力的高要求,埃斯顿重负载机器人拥有4大核心技术优势,分别是多目标系统优化技术、误差估算与补偿算法、高负载下最优运动最优轨迹规划及高精度运动控制、高速度振动抑制技术,满足客户精确高效的制造需求。
瞭望国际化的竞争格局,聚焦中国市场的精细化应用。我们仍将持续深耕细分领域市场,秉承让制造更智能、让品质更卓越、让生活更美好、让世界更绿色的使命愿景,让人人享受自动化的成果。
当您遇到以下场景,
埃斯顿给您的解决方案
场景一:机器人超惯量使用后,出现缩短机械或电机使用寿命的情况怎么办?
别担心!埃斯顿依靠动力学算法,能够准确设置负载的惯量信息,或启用负载自动辨识后,控制系统会自动调整适用的动态参数,能够在保护机械本体不受损伤的情况下,发挥系统的最大动态性能。
场景二:短时间内无法示教提升机器人节拍速度,或机器人出现抖动的情况怎么办?
别担心!埃斯顿机器人拥有自学习振动抑制和motion mode技术,能够通过简单引导式步骤,自动测算振动抑制和加减速参数,可大幅削减抖动现象和根据场景轨迹提升节拍,减少人员调试成本和对专家的依赖。
场景三:在焊接、涂胶、去毛刺等应用中机器人出现轨迹偏差过大的情况怎么办?
别担心!埃斯顿基于全动力学模型的控制技术和软件标定技术,改进提升机器人的轨迹精度和定位精度,同时针对不同工艺进行优化,比如焊接应用的短距离加速能力,涂胶的变姿态恒速保持功能等,最大程度发挥机器人的性能。
场景四:当机器人与外部轴联动应用,存在轨迹协同精度差的情况怎么办?
别担心!埃斯顿控制器配备了专用的导轨标定界面,操作简便,导轨协同精度能够得到有效保证。
场景五:当面临点焊机器人工艺及方案设计选型困难的情况怎么办?
| 高刚性机械本体+高性能电机+全动力学模型速度提升算法,搭配全新升级点焊软件包,拥有双机协作能力,满足高节拍点焊应用需求。
|
来找我!针对汽车行业典型应用——点焊,埃斯顿前期做了深入调研,涉及电柜、本体、性能、通讯、仿真、工艺软件等各个方面,针对性地开发了点焊专用电柜及本体,拥有高性能轨迹规划算法,多种总线通讯(主/从,安全/非安全),PDPS软件适配(专用RCS控制器)等专用的点焊工艺软件包等功能,全方位满足汽车行业的应用需求。
|
埃斯顿自动化全新一代机器人,针对全系列76款机器人均进行了升级。轻量型,通用四轴,通用六轴,弧焊,折弯,压铸,点焊等行业专用机器人,在性能,操作的便捷性上面均有质的飞跃。
埃斯顿自动化将持续创新,保持产品与服务跻身全球机器人行业第一阵营,力争打造全球领先的工业机器人品牌,以卓越的品质推动中国机器人行业蓬勃发展。
以上资料由分会副理事长单位南京埃斯顿自动化股份有限公司提供