本机集成3个通讯口,其中1个PPI,1个PPI/FPORT,一个FPORT,14DI/10DO共24个数字量I/O,程序空间72KB, 数据空间110KB;6个独立的200KHz高速计数器,4轴独立200KHz高速脉冲输出(脉冲+方向)。支持相对/绝对定位,两轴直线/圆弧插补,回原等指令,可以满足一些复杂控制功能的场合。
订货号:CTS7 216-1AH34-0B24
规 格:CPU226H,24VDC电源,14DI/10DO
订货数据
|
订货号
|
规格参数
|
|
区别
|
通用规格
|
|
CTS7 216-1AH33-0X24
(停产)
|
2轴运动控制,支持相对定位功能,无插补;
|
*14 DI/10DO
*24VDC电源,200KHz高速脉冲输出,6路200KHz高速脉冲计数(4路A、B相输入)
* 1个PPI,2个自由口,24KB程序空间(可扩展至72KB),10KB数据空间(可扩展至110KB),
*支持外部电池和存储卡。
|
|
CTS7 216-1AH33-0B24
(停产)
|
4轴运动控制,支持相对定位功能,无插补;
|
|
CTS7 216-1AH33-1B24
(停产)
|
4轴运动控制,支持相对定位和两轴直线圆弧插补功能;
|
|
CTS7 216-1AH33-2B24
(停产)
|
4轴运动控制,支持相对定位和两轴直线圆弧连续插补功能;
|
|
CTS7 216-1AH34-0X24
(226H)
|
2轴运动控制,支持相对/绝对定位功能,无插补;1个PPI口/1个可切换口/1个自由口
|
*14 DI/10DO
*24VDC电源,6路高速脉冲计数(4路A、B相输入),都高达200KHZ,
* 24KB程序空间(可扩展至72KB),10KB数据空间(可扩展至110KB),
*支持外部电池和存储卡。
|
|
CTS7 216-1AH34-0B24
(226H)
|
4轴运动控制,支持相对/绝对定位功能,无插补;1个PPI口/1个可切换口/1个自由口
|
|
CTS7 216-1AH34-1B24
(226H)
|
4轴运动控制,支持相对/绝对定位和两轴直线圆弧插补功能;1个PPI口/1个可切换口/1个自由口
|
|
CTS7 216-1AH34-2B24
(226H-CAN)
|
4轴运动控制,支持相对/绝对定位和两轴直线圆弧连续插补功能,支持CAN通信;2个可切换口/1个CAN通信口
|
技术参数
性能参数
|
物理特性
|
|
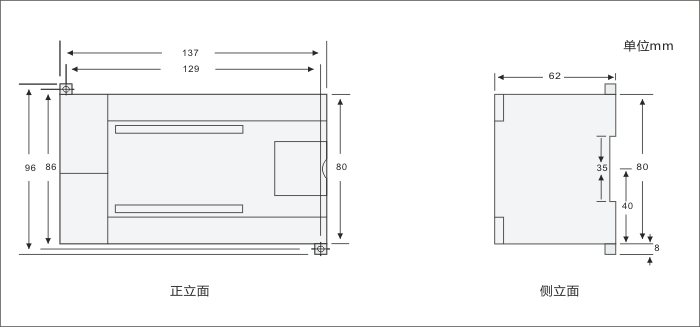
尺寸(宽×高×深)
|
137×80×62mm
|
|
功耗
|
9W
|
|
存储器特性
|
|
程序存储器
|
基本24KB,可扩展至72KB
|
|
数据存储器
|
基本10KB,可扩展至110KB
|
|
超级电容
|
约112小时(典型值)
|
|
外接电池(可选)
|
约200天(典型值)
|
|
常规特性
|
|
定时器总数
1ms
10ms
100ms
|
256
4
16
236
|
|
计数器总数
|
256(由超级电容备份)
|
|
内存存贮器位
|
256(由超级电容备份)
|
|
内存存贮器位掉电保持
|
112
|
|
时间中断
|
2个1ms分辨率
|
|
边沿中断
|
4个上升沿和/或4个下降沿
|
|
模拟电位器
|
2个8位分辨率
|
|
布尔量运算执行时间
|
0.15μs
|
|
浮点运算执行时间
|
8μs
|
|
时钟
|
内置
|
|
集成的通信功能(PPI/自由口)
|
|
通讯接口
|
226H
|
3个通讯口,PORT0:PPI口,RS485电平;PORT1:PPI/自由口,RS232和RS485两种电平;FPORT:自由通讯口,RS485电平
|
|
226H-CAN
|
2个通讯口,PORT0:PPI/自由口,RS485电平;PORT1:PPI/自由口,RS485电平;
|
|
PPI波特率
|
9.6, 19.2和187.5k
|
|
自由口波特率
|
1.2kbaud 至 115.2k
|
|
每段最大电缆长度
使用隔离中继器
未使用隔离中继器
|
波特率为187.5时1000米,38.4k时1200米
50米
|
|
最大站点数
|
每段32个站,每个网络126个站
|
|
最大主站数
|
32
|
|
点到点(PPI主站模式)
|
是(NETR/NETW),共8个,2个保留
|
|
集成的通信功能(CANopen)(仅226H-CAN)
|
|
通信接口
|
1个(4孔端子),见“CANopen通信接口表”
|
|
传输速率(Kbit/s)
|
1000
|
800
|
500
|
250
|
125
|
50
|
20
|
|
最大长度(m)
|
25
|
50
|
100
|
250
|
500
|
1000
|
2500
|
|
最大站地址
|
127
|
|
站点地址范围
|
1-127
|
|
最大主站带从站数
|
32
|
|
最大数字量访问
|
|
普通IO
|
CANopen专用IO
|
|
字节数
|
内存起始地址
|
字节数
|
内存起始地址
|
|
输入
|
16
|
IB0
|
64
|
IB16
|
|
输出
|
16
|
QB0
|
64
|
QB16
|
|
最大模拟量访问
|
|
通道数
|
内存起始地址
|
通道数
|
内存起始地址
|
|
输入
|
32
|
AIW0
|
128
|
AIW64
|
|
输出
|
32
|
AQW0
|
128
|
AQW64
|
|
I/O特性
|
|
本机数字量输入点数
|
14
|
|
输入类型
|
漏型/源型
|
|
本机数字量输出点数
|
10
|
|
输出类型
|
固态 - MOSFET(漏型)、外部负载共阳接线
|
|
数字I/O映象区
|
256(128输入/128输出)
|
|
模拟I/O映象区
|
64(32输入/32输出)
|
|
允许最大扩展I/O模块数
|
7
|
|
最大数字量I/O点数
|
230
|
|
最大模拟量I/O点数
|
56AI/28AO
|
|
脉冲捕捉输入
|
14
|
|
脉冲输出
|
2/4轴×200KHz(不支持编程软件中的PLS输出,需运行co-trust公司提供的软件包)
|
|
高速计数器
总数
单相计数器
两相计数器
|
6
6×200KHz
4×200KHz
|
|
数字量输入特性
|
|
本机集成数字量输入点数
|
14
|
|
输入类型
|
漏型/源型 (IEC 类型1/漏型)
|
|
额定电压
|
24V DC(B系列)、5V DC(A系列)
|
|
最大持续允许电压
|
30V DC
|
|
电涌电压
|
35VDC持续0.5S
|
|
逻辑1信号 ( 最小)
逻辑0信号 ( 最大)
|
16 VDC以上 I1.1,I1.5除外)
1, 5 VDC以上(I1.1,I1.5)
8 VDC以下 (I1.1,I1.5除外)
5 VDC以下(I1.1,I1.5)
|
|
隔离(现场与逻辑)
光电隔离
隔离组
|
有
500V AC,1分钟
见接线图
|
|
同时接通的输入
|
14
|
|
最大电缆长度
屏蔽
非屏蔽
|
500米(普通标准输入)
300米(普通标准输入)
|
|
数字量输出特性
|
|
本机集成数字量输出点数
|
10
|
|
输出类型
|
固态 - MOSFET(漏型)、外部负载共阳接线
|
|
额定电压
|
24V DC
|
|
输出电压范围
|
5V至 28.8 VDC
|
|
逻辑1信号(最大)
逻辑0信号(最小)
|
0.5V
Vcc 减0.5V
|
|
每点额定电流(最大)
每个公共端的额定电流(最大)
漏电流(最大)
浪涌电流(最大)
|
0.5A
4 A
10μA
8A,100ms
|
|
灯负载(最大)
|
3.5 W
|
|
接通电阻(接点)
|
0.3 欧姆 典型值(0.6欧姆 最大值)
|
|
隔离(现场与逻辑)
光电隔离
隔离组
|
有
500V AC,1分钟
见接线图
|
|
延时(最大)
断开到接通/接通到断开
|
0.2us(Q0.0~ Q0.7),50us(Q1.0和Q1.1)
|
|
脉冲频率(最大)
|
2轴:200KHz(Q0.0~Q0.3)、1 KHz(Q0.4~Q1.1)
4轴:200KHz(Q0.0~Q0.7)、1 KHz(Q0.4~Q1.1)
|
|
同时接通的输出
|
10
|
|
两个输出并联
|
否
|
|
最大电缆长度
屏蔽
非屏蔽
|
500米(普通输出)
150米(普通输出)
|
配件及相关链接:
1、编程电缆:CTS7 191-USB30;
2、电池:CTS7 291-8BA33;
3、编程卡:CTS7 291-PC001;
4、存储卡:CTS7 291-MC064/MC256;
5、差分模块:CTS7 291-EC001;
6、运动控制库及其库文件使用说明。
安装规格
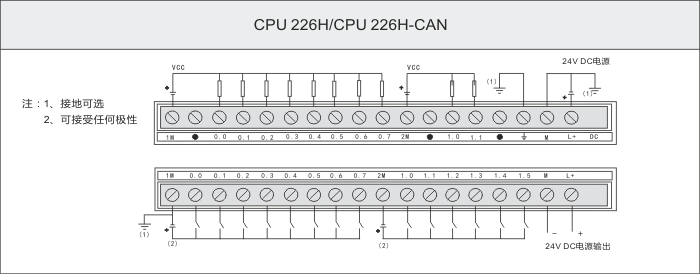
说明:运动控制功能的特殊IO输出与普通IO输出的对应关系:
|
普通IO
|
Q0.0
|
Q0.1
|
Q0.2
|
Q0.3
|
Q0.4
|
Q0.5
|
Q0.6
|
Q0.7
|
Q1.0
|
Q1.1
|
|
运动控制IO
|
Pulse_0
|
Dir_0
|
Pulse_1
|
Dir_1
|
Pulse_2
|
Dir_2
|
Pulse_3
|
Dir_3
|
Q1.0
|
Q1.1
|
注:
1、 .Pulse_0 --------0轴脉冲输出 ;
Dir_0 -------0轴方向输出 ;
.Pulse_1 --------1轴脉冲输出 ;
Dir_1 -------1轴方向输出 ;
.Pulse_2 --------2轴脉冲输出 ;
Dir_2 -------2轴方向输出 ;
.Pulse_3 --------3轴脉冲输出 ;
Dir_3 -------3轴方向输出 ;
2、 Q0.0和Q0.1 不支持编程软件中PTO和PWM高速脉冲输出。
3、 此CPU数字量输出点需外部负载需共阳接线(普通晶体管型CPU是外部负载共阴接线)。
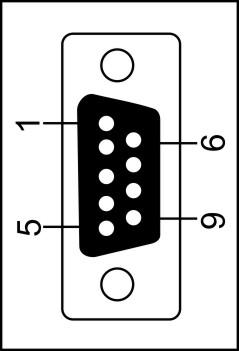
通讯端口定义(226H)
|
连接器
|
针
|
PORT0
|
FPORT0
|
FPORT1
|
|
|
1
|
机壳接地
|
机壳接地
|
1:机壳接地
|
|
2
|
逻辑地
|
逻辑地
|
2:RS485信号B/+
|
|
3
|
RS485信号B
|
RS485信号B
|
3:RS485信号A/-
|
|
4
|
发送申请
|
发送申请
|
|
|
5
|
逻辑地
|
逻辑地
|
|
|
6
|
+5V,100Ω
|
+5V,100Ω
|
|
|
7
|
+24V
|
+24V
|
|
|
8
|
RS485信号A
|
RS485信号A
|
|
|
9
|
空
|
10位协议选择(输入)
|
|
|
连接器外壳
|
机壳接地
|
机壳接地
|
|
通信端口定义(PPI/自由口)(226H-CAN)
|
连接器
|
插针号
|
PORT1(RS485)
|
PORT0(RS485)
|
|
|
1
|
机壳接地
|
机壳接地
|
|
2
|
逻辑地
|
逻辑地
|
|
3
|
RS-485信号B
|
RS-485信号B
|
|
4
|
RTS(TTL)
|
RTS(TTL)
|
|
5
|
逻辑地
|
逻辑地
|
|
6
|
+5V,100Ω串联电阻器
|
+5V,100Ω串联电阻器
|
|
7
|
+24V
|
+24V
|
|
8
|
RS-485信号A
|
RS-485信号A
|
|
9
|
/
|
/
|
|
连接器外壳
|
机壳接地
|
机壳接地
|
通信端口定义(CANopen通信口)(226H-CAN)
|
连接器
|
插针号
|
信号描述
|
|

|
1
|
屏蔽地
|
|
2
|
CAN_H
|
|
3
|
CAN_L
|
|
4
|
终端电阻选择(和3#脚短接表示加终端电阻)
|
样本/手册/软件
|
类型
|
名称
|
下载
|
|
选型手册
|
《PLC&HMI选型手册》
|
↓
|
|
用户手册
|
200系列PLC用户使用手册
|
↓
|
|
相关软件
|
MagicWorks PLC
|
↓
|
|
编程驱动
|
CTS7 191-USB30编程电缆驱动程序
|
↓
|
