常国祥1,李 志1,包龙新2
(1.黑龙江科技学院,黑龙江 哈尔滨 150027;2.上海禧龙太阳能科技有公司,上海 201517)
摘 要:文中研究了60°坐标系下SVPWM一种新算法,通过3个基本矢量的开关状态函数根的个数来确定每个基本 矢量的类型即零矢量、小矢量、中、大矢量。无需判断大扇区以及矢量作用时间复杂的分配,简化了计算。Matlab\simulink仿真结果表明了该算法有效性。
关键词:60°坐标系;SVPWM;开关状态函数
中图分类号:TM921.51 文献标识码:A 文章编号:1003-7241(2012)04-0072-04
1 引言
中点箝位式(neutral-point-clamped NPC)三电平逆变器相对于传统两电平逆变器有很多的优势,三电平NPC逆变器输出性能取决于PWM控制策略,空间电压矢量调制技术(SVPWM)以其易于数字实现,直流电压利用率高等优点,得到了广泛的应用[1-2]。传统的SVPWM的算法在确定参考矢量扇区的和开关时间上需要大量的三角函数的运算,占用主控芯片的大量资源[2-3]。文献[2]细论述了基于 60°坐标系的三电平逆变器空间电压矢量调制的原理以及基本矢量及其作用时间的计算。文献[3]、[4]论述的60°坐标系SVPWM的算法都需要区分参考矢量所在大扇区和所处的小三角形区域。
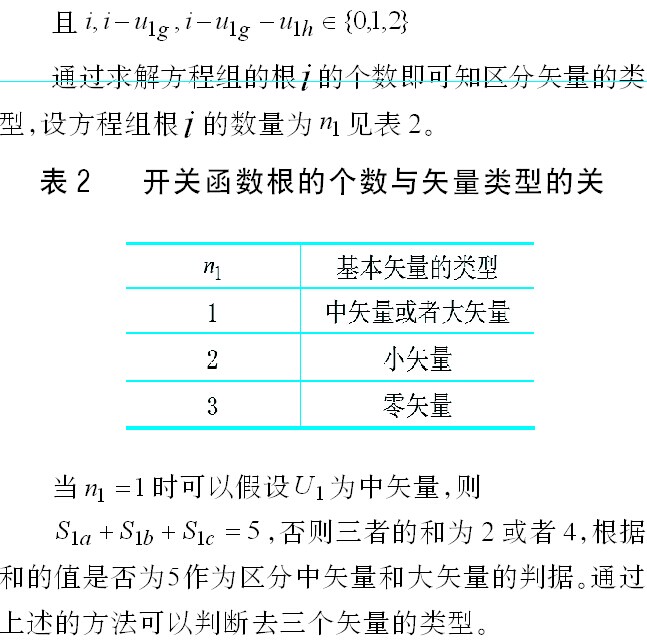
本文研究的基于60°坐标系下SVPWM算法无需扇区的判断和三角函数的运算,只需要根据3个基本矢量的开关状态函数根的个数来确定每个基本矢量的类型即零矢量、小矢量、中、大矢量,然后重新分配矢量的作用顺序和时间,无需进行大量的查表。
2 传统的三电平空间矢量调制[5-6]
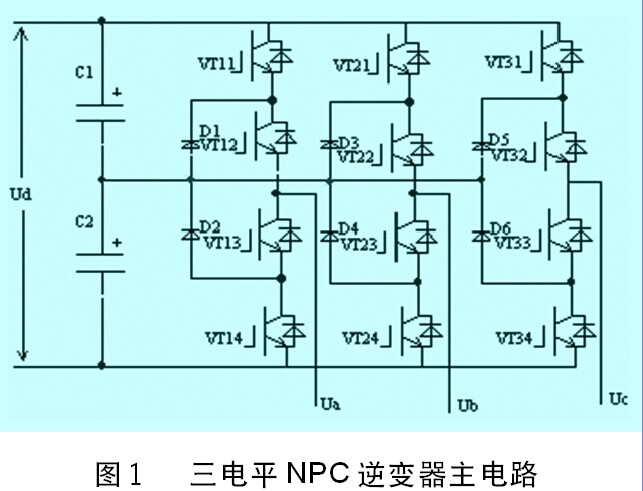
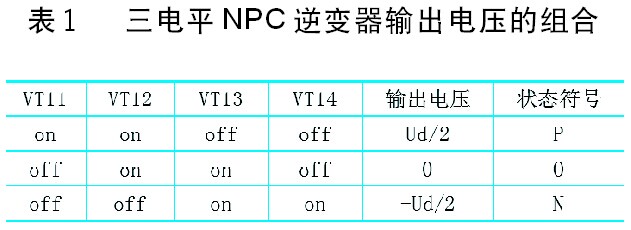
三电平NPC逆变器电路如图1所示每一相有四个IGBT器件,改变开关状态可获得三种不同的输出电压。表1为A相输出的电压组合,用P、O、N表示输出的三电平。所有空间矢量可以分类为零矢量、小矢量(内六边形的顶点)、中矢量(外六边形边的中点)和大矢量(外六边形的顶点),零矢量和小矢量都有冗余开关状态

传统SVPWM算法的基本思路是:确定合成参考电压矢量的三个基本矢量;确定每个基本矢量的作用时间;确定基本矢量的开关状态和输出次序,采用七段式或五段式调制生成所需的PWM波形。算法中需要判断参考电压矢量所在扇区、小三角形区域以及计算基本矢量作用时间,这些都需大量的运算。以扇区I为例,参考矢量如图2所示[2]处在B三角形区域中
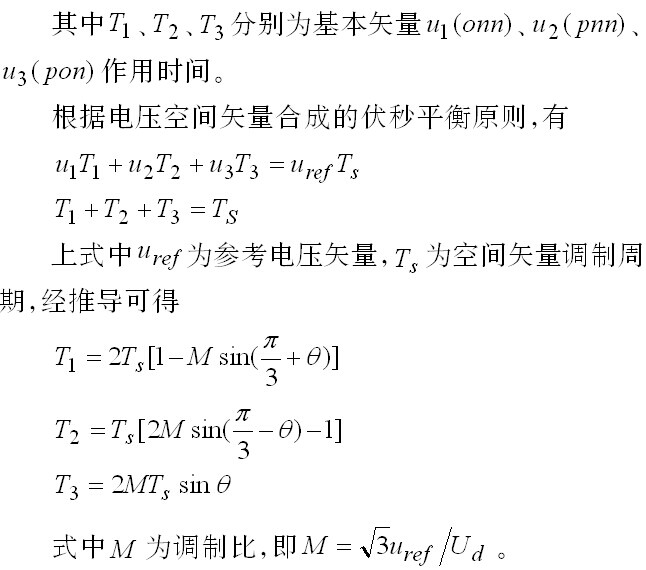
同理可得参考矢量位于A、C、D三角形中的三个矢量的作用时间,根据对称性,可以求出其余5个扇区的矢量作用时间。
3 60°坐标系SVPWM的算法
该算法是依据三电平基本空间矢量之间的角度均为60°的倍数这一特点,采用非正交的60°坐标系。这样有助于参考矢量的合成与作用时间的简化,实现三电平NPC逆变器的快速脉宽调制控制。
3.1 基本矢量类型的确定
设60°坐标系为g-h坐标系,取g轴和α-β坐标系中的α轴重合,逆时针旋转60°为h轴。关于α-β坐标系转化到g-h坐标系;基本矢量的确定;作用时间的计算有很多文献进行论述[2-4],本文在此略去。
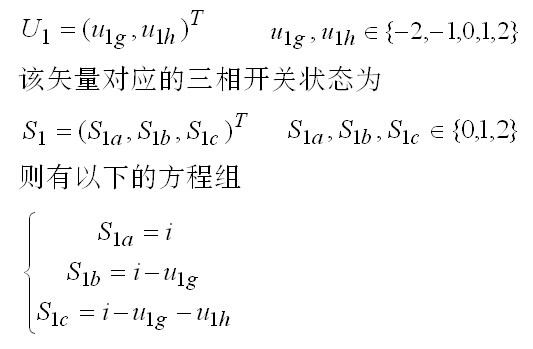
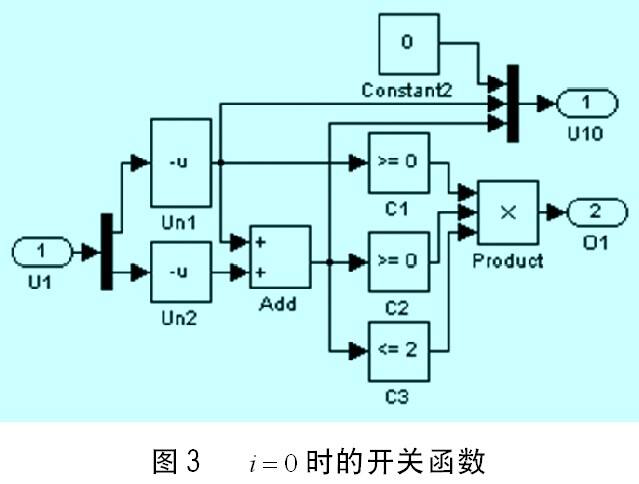
在得到参考矢量的三个基本矢量后,通过开关状态函数可以确定三相输出开关的状态,本文中三相开关状态N、O、P分别用0、1、2表示。设三个基本矢量之一为:

4 仿真结果与分析
为了验证基于60°坐标系下的SVPWM算法的有效性,建立了基matlab\Simulink的仿真模型,仿真使用了三相阻感性负载进行研究。
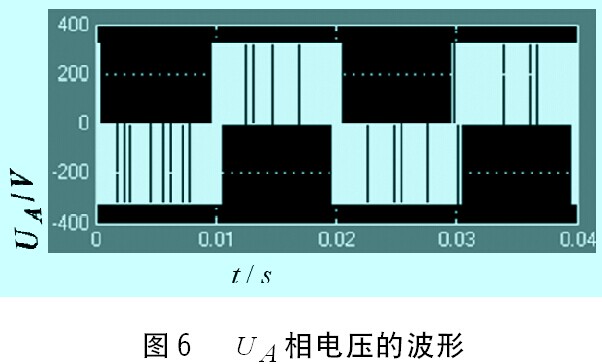
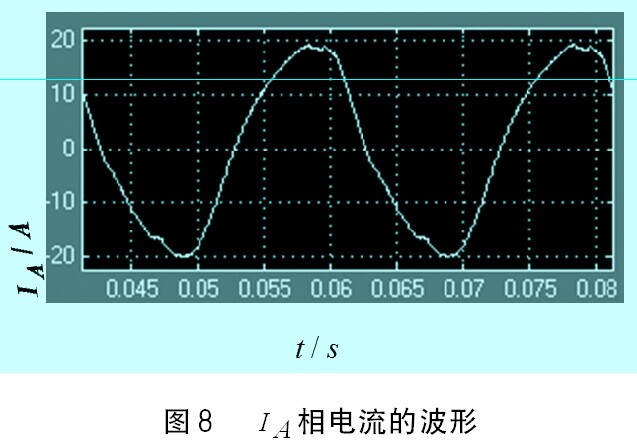
本文所采用的三相负载参数为:电阻R=10Ω,电感L=45mH,直流电压为650V,调制比=0.804,给出了采样频率为5kHz、系统输出频率为50Hz时的运行波形,如图6-8所示验证了在三电平NPC逆变器中采用60°坐标系下SVPWM算法的正确性和有效性。

5 结束语
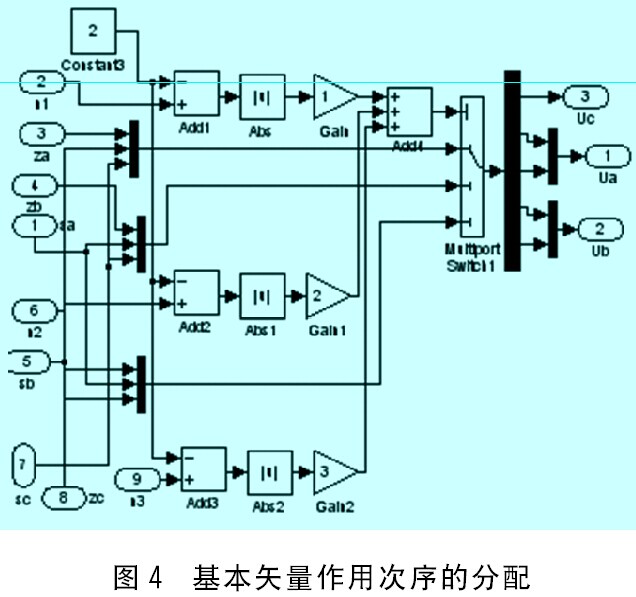
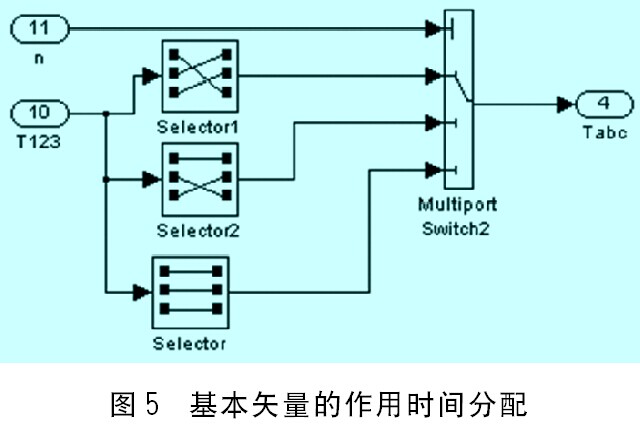
详细论述了一种基于60°坐标系的三电平NPC逆变器的SVPWM的算法,通过对3个基本矢量的开关状态函数根的个数的利用,简化了基本矢量作用次序和作用时间的分配,不需要大量的查表和复杂的运算,为三电平NPC逆变器SVPWM实时控制提供了一种十分有效的方法。仿真结果证明了该算法的正确性和有效性。
参考文献:
[1] LAI J S,PENG F Z.Multilevel converters–A new breed of powerconverters[J].IEEE Transactions on Industry Applications,1996,32(3):509-517.
[2] 赵辉,李瑞,王红君等.60°坐标系下三电平逆变器SVPWM方法的研究[J].中国电机工程学报,2008,28(24):41-42.
[3] 李国丽,夏秋实,胡存刚等.三电平NPC逆变器SVPWM方法研究[J].电气传动,2007,37(12):31-34.
[4] 苟斌,冯晓云.60°坐标系下三电平逆变器SVPWM的实现[J].电力电子技术,2011,45(5):65-66.
[5] BUSQUETS S,BORDONAU J,BOROYEVICH D,et al.The nearest three virtual space vector PWM-a modulation for the comprehensive neutral-point balancing in the three-level NPC inverter[J].IEEE Power Electronics Letters,2004,2(1):11-15.
[6] 李永东,肖曦,高跃.大容量多电平变换器原理·控制·应用[M].北京:科学出版社,2005.