最新7月2日发生在德国大众工厂的“机器人杀人”事件将机器人安全问题又一次提到人们面前,机器人的安全必然是未来关注的要点,严格来说,这是一个事故,并非机器人会杀人,而是操作人员进入工作区间,但是,如何让机器人更安全的与人工作则是一个更为广泛且值得关注的问题。

1、机器人安全起源与主要思想
谈到机器人安全,Asimov的科幻小说《机器人》中有一个重要的规则:
①机器人不能主动伤害人,也不能通过不作为使人受到伤害
②机器人必须遵循人的指令,除非该指令与第一条规则冲突
③机器人必须保护其自身不受伤害,除非该行为同第一条和第二条规则冲突。
尽管这是机器人产生之前的小说中的描述,然而,它对于机器人的安全仍然是具有广泛适用性的。
很多时候,我们不重视安全问题,因为安全的确是一个看上去巨大的投资,而某种意义上,立法略微滞后于产业实际,因为,机器人的快速成长也就在这几年发生并将在未来会更为高速的增长。
关于机器人的安全研究历史也是比较悠久的,Ziskovsky在1995年将机器人安全延展至整个生命周期的过程,这一思想也延伸到电气传动的安全领域,当然,针对机器人本身也有很多其它研究方向例如安全性与生产过程的效率平衡问题,这也为今天很多安全技术奠定了理论基础,包括今天的集成安全技术(Integrated Safety),如何在确保安全的同时解决生产效率的问题,概括为两点:
1.安全是一个全生命周期概念
2安全必须与生产力平衡
当然,实现安全的方法也分为很多种,例如:基于控制系统速度监控、视觉方式、力矩测量反馈方式等
2、为何要重视安全
只有对企业造成市场的损失、重大事故导致的法律责任、因此而造成的设备损失等因素才能驱动企业去投资安全技术,而对于机器人行业而言,也必须考虑以下几个因素:
1机器人与人协同才能达到最大的效率;
对于一些生产而言,由于机器人被关在铁笼子里,这使得很多复杂的需要人配合的工作无法进行,因此,在未来,人机协同工作是一个热点研发方向,而正因为如此,安全将会更为突出。
2非安全机器人融入有安全要求的生产线;
对于机器人制造商而言,进入不同的行业,必须考虑生产系统本身的安全性,系统的安全性取决于最短的那块板,如果机器人本身无安全系统,则意味着带来整个产线的安全等级将为0-对于生产系统而言,这是不允许的。
3政策法规的要求。技术壁垒角度也会设置安全标准;
无论是IEC、ISO还是行业的,都会有对安全的标准要求,未来这将成为一个技术壁垒也会成为政策性必须完善的领域。
④安全系统开发周期长,不属于拿来即用的,因此必须未雨绸缪;
4对终端生产企业而言,安全的生产环境是对员工的承诺;
很多时候,相对于安全所造成的后果,安全系统的投资并不是那么大,并且,提供更为安全、健康的工作环境,在人力资源越发匮乏的未来是一种企业负责人的表现。
3、SafeROBOTICS技术
早在2010年,贝加莱即开发了SLS@TCP来解决机器人关节的速度限制问题,这是符合EN ISO 10218-1规范的,针对机器人工具中心点(TCP)的速度限制,在以下几种情况下对人起到保护作用:
①减速运行
②示教
③设备维护
之所以需要设计SLS@TCP,是因为机器人的TCP速度并非像定位同步控制的速度是一个给定值,机器人的TCP是一个运动学值,是与各个关节的速度均是有关系的,并且,在出现动作时,减速也意味着需要为每个关节计算速度值。
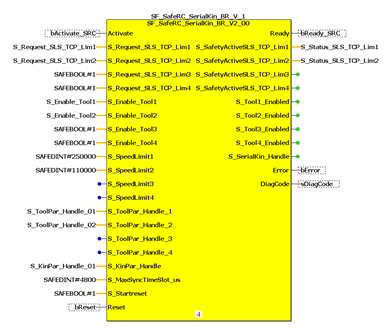
图1.SLS@TCP功能块示例
对于安全的开发,基于Automation Studio内嵌的SafeDESIGNER,用户可以以可视化方式开发集成安全应用,这里的集成包含:
(1).SafeMOTION、SafeI/O、SafeLOGIC、openSAFETY、SafeROBOTICS
(2).机器人与运动控制的安全协同,即,机器人并非独立工作,而是与其它设备在安全域的集成,可以实现诸如机器人与注塑机、钣金设备、变位机等的安全集成,确保整线而非单机的安全工作。

基于PLCopen Safety的库使得其更为标准化,也更为简单,这些功能块均是经过测试并反复验证,满足IEC61508、EN13849等国际标准。
4、安全新增SLP & SLO功能
2014年,贝加莱更新了多种用于安全机器人控制的功能。用户只需登陆SafeDESIGNER就可监测以下功能:SafeRC SLS,SafeRC SLP和SafeRC SLO。这些SafeROBOTICS功能基于“配置方便(Easy-to-configure)”的功能块,不仅灵活适应环境,而且方便验证。
除了监测TCP速度和串联机器人所有关节速度(即SLS),也可用来监测SLP和工具安装法兰定位。贝加莱ACOPOS伺服驱动提供安全轴定位,这一定位集成了安全功能。已知该定位,就可以计算出所有关节坐标位置,工具安装方兰坐标位置,TCP坐标位置和附加监测点坐标位置。
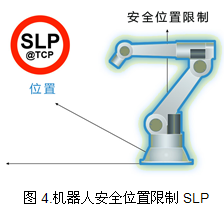
4.1 SLP-安全位置限制
如图1,为了更直观地监测安全工作空间(SLP),将旋转立方体定义为工作空间(WS),旋转平面定义为安全间隙(SS)。在安全应用中,一些特殊函数空间用于控制与位置有关的运动;这些特殊函数空间扩大了SafeRC SLP安全功能的范围。

4.2计算制动距离
依据流速和机器人位置可以确定每个运动物体的制动距离。如果设定好制动减速,在达到工作空间界限之前机器人无法停止,这就表明仍有状态输出。当工作空间受到妨碍时,可以最大程度地减少超出距离,让工作空间限制更精确地契合机器人的操作区域,从而减少空间需求。
例如,依据应用,通过触发所有关节轴的STO功能可以停止机器人动作。计算和确定位置的公差可以确保在工作空间受干扰前已经设定好状态输出。
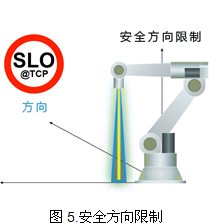
4.3安全方向监测
安全定位监测用来监测工具安装法兰在空间的位置,即固定的方向矢量和随法兰移动的方向矢量之间的角度。方向矢量的自由选择应用很广,这种选择已经结合了安全应用中多情况监测功能块。例如,可以定义已监测的与电流TCP位置相关的工具定位边界角,通过状态输出可表明是否超出空间中限定的边界角。
4.4监测被动关节以增加安全性
在现有速度检测功能(SLS)上增加了新特征。例如,配置和监测那些随机器人移动的额外监测点,包括串联机器人的被动关节。这些关节的轴位置是主动关节轴位置的线性组合,连起来可以增加配置中串联机器人的数量。

4.5采用诊断功能块进行验证
除了参数和安全功能块,需要特别注意验证用于安全应用方面的参数。针对这一需求,诊断功能块既可以验证机器人的配置,也可以验证与监测功能相关的参数。采用诊断功能块,可以输出坐标位置,所有运动物体的速度,定位角度以及制动距离。在不改变安全应用的试车环节,可以验证与安全相关的参数。
机器人的安全问题必须得以重视,尤其对于那些行业的领导者而言。
