1 引言
近年来,对移动机器人的研究受到重视,特别是在工程探险、反恐防爆、军事侦察等领域,人们已经清楚地体会到地面移动机器人的优越性。移动机器人能够移动到预定目标,完成设定的操作任务,相应地对移动机器人系统也提出了更高的要求,特别是在机器人的自主性、作业能力等方面的要求越来越高[1]。目标跟踪是对于自主移动机器人是一项重要任务,监视和跟踪运动目标的运动或者保持对静态目标的瞄准[2]。绝大多数研究都使用单个计算机结合高质量的数码相机用于图像处理,尽管开源,但是这类系统价格不菲,体积庞大,而且耗能高。这类系统一般不灵活,不适合应用于小型移动机器人[3]。目前研究的视觉跟踪算法处理的对象都是包含巨大数据量的图像,这些算法往往需要大量的计算时间,很难达到实时处理的要求。
本文针对小型移动机器人视觉跟踪的设计要求,提出了一种简单而实用的视觉跟踪控制方法,使用一种低成本的嵌入式彩色视觉系统来瞄准静态目标,降低了系统功耗、提高了算法的实时性,并在一个具有4WS4WD和差分机构的移动机器人平台上运行得到充分验证。试验证明其视觉跟踪系统即使对于低分辨率的颜色图片,也能表现出鲁棒的目标跟踪行为。
2 系统结构
2.1 移动机器人平台
如图1所示,本文采用的机器人平台由实验室自主研发,具有在崎岖地面环境运动导航的能力。它具有全地形运动能力,运动地形可以是凹凸不平和布满沙石,或简单的平坦地面,机器人都能前行自如[4]。

图1 移动机器人平台
移动机器人的主要特征如下(图2):
1. 移动机器人具有四个独立驱动轮,并且配有相应的转向机构;
2. 驱动轮都由一个低电流的12V直流马达驱动。马达内嵌在每个独立驱动轮中;
3. 差分机构能够保证在运动过程中四个轮子始终与地面接触,平衡了各个轮子上的有效载荷,提高了驱动轮的牵引力,保证在不平坦地面的稳定运行,而且能够保证机器人崎岖地面运行中保持低的俯仰角。
4. 主车体纵向俯仰摆角是两侧摇臂机构纵向俯仰摆角的均化值,有效减小了主车体因地形变化所受到的扰动。

图2 移动机器人配置
基于以上特点,机器人具有多种机动性,能实现全方位、爱克曼和双爱克曼等机动模式,并且能在崎岖地面有效前行[5]。机器人车载传感器有视觉摄像头,编码器,嵌入式计算机以及加速度计等。图像处理任务时实时并在车载上完成。
2.2 彩色视觉系统
本文的移动机器人采用的视觉系统是基于CMUcam3摄像头,它由卡耐基梅隆大学开发。是一个低成本、可编程、适合实时处理的嵌入式彩色视觉系统。它包括三个主要构件:COMS光学传感器,先进先出队列和60 MHz ARM处理器。该连接方式允许能从摄像头的视频流中直接提取出数据,然后传递给车载计算机用于后续数据处理。它通过标准的RS232串行端口和车载计算机相连。
视觉系统固定在一个云台机构上,一起安装位于机器人的前上端,如图3所示。云台包括两个配件,底层配件由一伺服电机驱动,能在y方向上转动180°;上层配件由另一伺服电机驱动,能在x方向上转动180°;云台采用的Hitec伺服电机能在很快速率下带动轻质量的视觉摄像头运动,从而保持摄像头持续瞄准目标。伺服电机的脉冲宽度范围是0.5ms和2.5ms。两伺服电机由USBSSC32路舵机控制板单独控制。

图3 彩色视觉系统
3 目标瞄准方法
视觉系统的一个主要功能是颜色跟踪。颜色跟踪是指在图像中分割出指定颜色,提取出图像中该颜色所占区域位置信息。本文的物体检测算法是基于通过区域分析后的彩色图像分割。视场中的颜色区域分析提供了光谱信息和空间信息,它可以用来结合时间帧信息来达到实时跟踪。摄像头的分辨率为88x143,能够以每秒50帧跟踪指定颜色。它实时采取图像然后通过使用自身处理器快速计算这些图像中的相关数据。基于识别方法的差别,视觉跟踪可以分为基于图像分割的跟踪、基于活动轮廓的跟踪和基于模板匹配的区域跟踪。基于图像分割的跟踪方法一直是视觉跟踪的主要方法,分割的线索包括了图像强度、颜色、运动、灰度直方图等,依据给定的特征将目标区域从图像中分割出来[6]。本文采用基于物体颜色和形状的图像识别方法。该方法的优点是识别速度快,结果较准确,对光线、颜色变化适应性较好,适合运动系统进行视觉伺服控制。HSV空间的各个分量是相互独立的,对同一颜色属性的物体,具有比较稳定的数值变化范围。它将颜色与饱和度和亮度分开,是图像分割中常用的模型[7]。
视觉系统内嵌处理器,完成图像的处理。提取图像RGB值,内嵌处理器将彩色图像转化为HSV模型,对其H、S两个分量分别做直方图,得到选定物体区域的H、S阈值。设定<H<,<S<1。其中,、分别为区域图像色调的最小阈值和最大阈值,为区域图像饱和度的最小阈值。内嵌处理器实时采集图像,每幅图像都与该阈值进行比较,剔除背景,分割出跟踪物体。然后对图像进行二值化、滤波和膨胀算法得到物体的中心坐标,并输出图像处理数据。该数据包中包含跟踪物体的中心坐标(和),区域框,识别出物体的标志T。移动机器人颜色跟踪和视觉瞄准目标中心的工作步骤如图4所示:
(1) 首先设定HSV模型的H和S的阈值。车载计算机周期性发送分割命令给视觉系统计算机;
(2) 待图像处理完,视觉系统返回数据包给计算机,其中包含目标中心在图像平面的坐标,可以直接用来跟踪物体;
(3)和(4)在自动颜色跟踪循环模式进行过程中,每次返回一帧图像的参数值。车载计算机能依据收到的数据计算出摄像头重新对准目标中心云台两伺服电机所需调整角度,并发送相应控制信号给舵机控制板。

图4 移动机器人目标跟踪系统工作步骤
首先,机器人判断由视觉系统返回数据包中的识别出物体的标志T是否为1,它表示着摄像头很好的锁定到指定物体,否则认为目标不在视场内。其次,因为摄像头分辨率为88X143,因此我们定义和分别代表图像平面中心坐标,定义和分别代表视觉系统返回数据包中指定颜色的中心坐标值。由于光线照明因素影响,对图像平面中心点坐标值允许一个合理误差范围,因此定义在图像平面定义中心矩形框,其中
则认为视觉系统成功瞄准目标中心。通过对比由定期发送分割指令得到的和与中心矩形框边界值,得到偏差并按照控制条件判断云台伺服电机调整的运动方向和计算相应运动角度。
云台水平方向伺服电机的运动控制条件如下:
4 实验验证

图5 实验目标
实验环境中采用日光灯照射,目标设计如图5所示:在日光灯表面覆盖一层红色薄纸,将其作为目标,测试结果表明跟踪效果良好。其次,对目标颜色跟踪初始化设置,并设定焦距。依据上述目标瞄准方法,调整云台伺服电机.最后,通过大量实验测试,综合考虑光照影响及颜色跟踪的精确度和灵活性,设定

每次跟踪控制循环云台水平方向伺服电机运动40us以重新瞄准目标,竖直方向伺服电机则为20us。
本实验目标在于依据所提出的跟踪控制方法,通过使用一种低成本的嵌入式彩色视觉系统来实现对一静态目标的持续有效瞄准。移动机器人运动地形分别为对称崎岖地面和非对称崎岖地面,如图6所示。

图6 崎岖地面目标跟踪瞄准实验图
试验结果如图7-12所示。
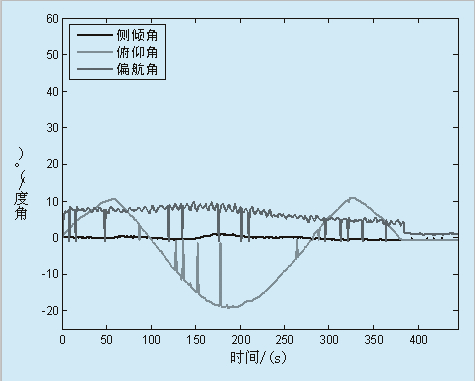
图7 对称崎岖地面IMU值
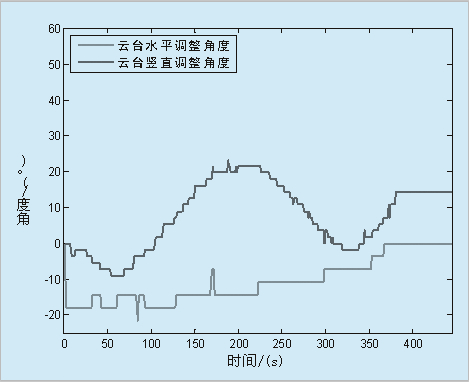
图8 对称崎岖地面云台伺服电机
角度调整值
通过以上实验结果,可知
(1) IMU得到的返回值准确反映了不同崎岖地面的机器人姿态特征。如图7可以看出,对称地面运动时车体俯仰角度随地形变化明显,显示出明显的规律性,车体横滚角和偏航角较小;而从图10可以看出,机器人开始运动后,先向左侧横滚,然后随地形起伏向右侧横滚,显示出规律性,与机器人运行情况实际情况基本一致。俯仰角与偏航角较小。角度偏差是因为轮子滑转和驱动轮直流电机不平稳的瞬态响应造成。
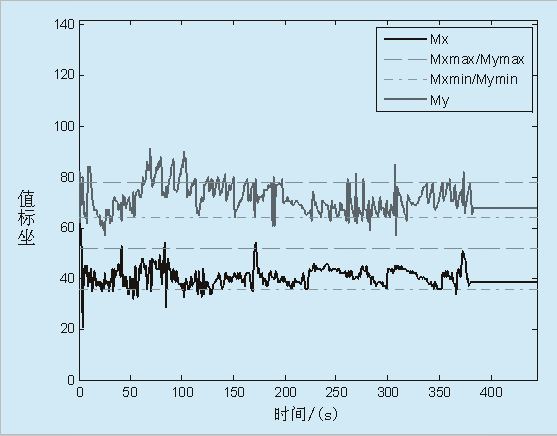
图9 称崎岖地面的目标中心坐标值

图10 非对称崎岖地面IMU值
(2) 随着机器人运动,俯仰角随着地形逐渐增大(减小),摄像头瞄准开始偏离目标,此时或值偏离出中心矩形框,车载计算机能根据跟踪控制方法即时判断,计算电机调整角度,控制云台伺服电机运动重新瞄准。
(3) 无论移动机器人在何种地形下运动,由视觉系统返回的Mx和My值能始终保持在图像平面的中心矩形框内,表明摄像头成功瞄准目标中心,证明所提出的跟踪控制方法简洁有效。
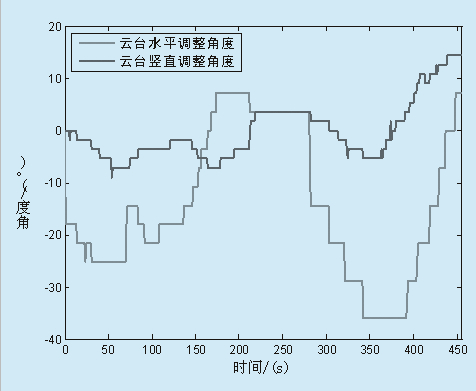
图11 非对称崎岖地面云台伺服电机
角度调整值
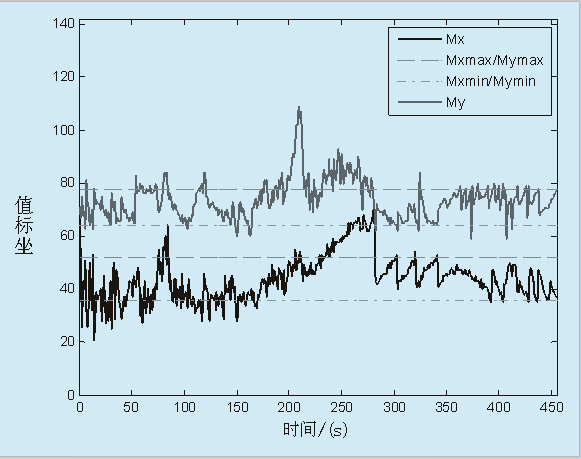
图12 非对称崎岖地面视觉系统实时返回的
目标中心坐标值
5 结束语
本文通过使用一种低成本的彩色视觉系统,提出一种实时目标跟踪控制方法。该方法独立于移动机器人运动学和动力学,在成本、大小、耗能和复杂度上都有优势,特别适合小型机器人在很多应用领域实现目标瞄准跟踪任务。为了验证提出的方法,实验设计为当移动机器人在结构化崎岖地面运动时保持车载视觉系统始终视觉瞄准目标。实验证明无论在何种地面运动,在移动机器人整个运动过程中,目标质心始终保持在图像平面中心的阈值框内,表明视觉系统能始终成功视觉瞄准目标。
参考文献:
[1] K.SJo,D.Galvez Lo PEZ,C.PAUL,P.JENSFENSFELT and D.KRAGIC."Object Search and Localization for an Indoor Mobile Robot"[J].Journal of Computing and Information Technology,2009,17(1):67-80.
[2] P.PALUNGSUNTIKUL and W.PREMCHAISWADI."Object detection and keep on a mobile robot by using a low cost embedded color vision system"[C].International Conference on Knowledge Engineering,Bangkok,2010:70-76.
[3] A.ROWE,A.GOODE,D.GOEL,and I.NOURBAKHSH."CMUcam3:An Open Programmable Embedded Vision Sensor"[C].Robotics Institute,Carnegie Mellon University,Pittsburgh,PA,Tech.Rep.CMU-RI-TR-07-13,May 2007.
[4] HE XU,X.Z.GAO,GAO-LIANG PENG,KAI XUEL,et al.Optimization of Reconfigurable Mobile Robots Based on Modified Harmony Search Method[J].Transactions of the Institute of Measurement and Control,2012,(34):334-360.
[5] HE XU,ZHENYU ZHANG,KAI XUE,X.Z.GAO,et al.Prototypes Selection by Multi-Objective Optimal Design:Application to a Reconfigurable Robot in Sandy Terrain[J].Industrial Robot:An International Journal,2011,38(6):599-613.
[6] J.BIKMAN,T.MEISWINKEL and J.CONRAD (2009),"A vehicle implementation of a color following system using the CMUcam3"[C].Proceedings of the IEEE International Conference on Southeastcon,Atlanta,2009:30-33.
[7] CHAUMETTE F,RIVES P,ESPIAU B.Positioning of a robot with respect to an object,tracking it and estimating its velocity by visual servoing[C].The IEEE International Conference on Robotics and Automation,Sacramento,California,1991.
[8] 杜欣,赵晓光.基于彩色图像的机器人视觉跟踪[J].武汉大学学报-信息科学版,2006,31(2):136-139.