1 引言
UUV在复杂的海洋环境中对目标进行跟踪,需要对目标进行实时观察,对目标的运动做出合理的预测与估计,以实现目标跟踪[1]。可靠而精确的目标估计与预测是UUV目标跟踪控制中的一项重要任务。UUV对于静态目标的预测主要是识别和估计目标的位置,而对动态目标的预测包括动目标的实时位置坐标、速度、加速度、轨迹等动态特性[2]。目前应用于目标预测中的方法主要有:(1)卡尔曼滤波滤波估计[3]。建立卡尔曼滤波模型进行预测,应用标准卡尔曼滤波对静目标预测;应用扩展卡尔曼滤波对动目标进行预测。卡尔曼滤波预测需要已知目标的实际运动模型,即要求已知目标的运动规律和各种干扰统计特性才能进行有效的预测。(2)最小二乘法滤波[4]。通过列出观测值与估计值之间的差(称为残差),然后求得残差的平方和,在逼近残差平方和取最小值的情况下来确定估计多项式的系数,从而确定估计多项式。然而,最小二乘法只是对线性运动有效,当目标进行变加速运动时将失去效用。灰色预测理论相对以上几种预测方法有其一定的优越性。灰色预测能对运动目标进行实时预测。
2 基于GM(1,1)模型的预测原理
灰色系统理论是控制论观点和方法的延伸,其核心是灰色模型GM(Grey Model)[5],它的显著特点则是生成函数和灰色微分方程。GM模型是以灰色生成函数为基础,以微分拟合为核心的建模方法。它根据系统的行为特征数据,找出因素之间和因素自身的数学关系或变化规律,建立一种描述被研究系统的动态变化特征的模型。在GM 模型中,基于原始数据序列所得到的1-AGO生成序列而建立的微分方程,记为GM(n, N)。其中n为微分方程的阶数,N为微分方程所包含的变量数。常用的单序列一阶线性灰色模型记作GM(1,1)模型[6]。基于GM(1,1)模型的预测原理和步骤描述如下:
(1) 将原始数据序列计为:

累加生成,简记为AGO(Accumulated Generating Operation),是灰色理论对原始数据采取的一种独特的处理方式。对于非负的数据序列,累加生成可以弱化随机性,增加规律性,使生成序列呈指数增长规律。
(3)建立GM(1,1)预测模型
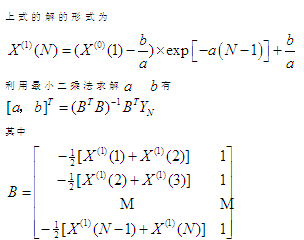
对一次累加生成序列建立一阶微分方程,可得GM(1,1)模型:
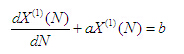
其中,为a b待定系数。
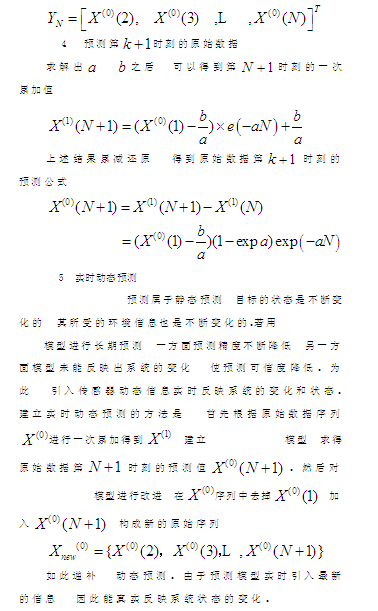
3 基于灰色预测的目标运动预测
采用灰色预测模型的方法完成对目标的运动预测流程如图1所示,并且说明如下。
(1).进行灰色预测前,应首先对传感器采得数据进行预处理,提取预测特征数据。预处理包括剔出野值、滤波和数据平滑等。
(2).可以通过获取传感器前个采样时刻的可靠的信息作为灰色动态预测的原始数据序列。
(3).为设定的目标信息预测准确性阈值,不同的传感器应有不同的诊断阈值,相同的传感器的诊断阈值也应根据运动的不同状态进行自适应调整。
(4).对目标信息进行预测时,并不能一次就得到较好的预测效果,通过和设定的残差值之间的比较来调整
阈值的大小,进而更新预测初始值,再次进行预测,当预测值与实际值之间的残差时,我们认为预测值满足跟踪的要求。从而进行预测,得到目标的位置及轨迹等信息。

图1 基于灰色模型的目标运动预测流程图
4 对目标典型运动的预测实例
本文针对目标进行三维匀速运动、匀加速运动、变加速运动等典型运动情况完成预测仿真,根据对目标位置与轨迹等信息的预测并与实际值相比较,从而实现对方法有效性的验证。
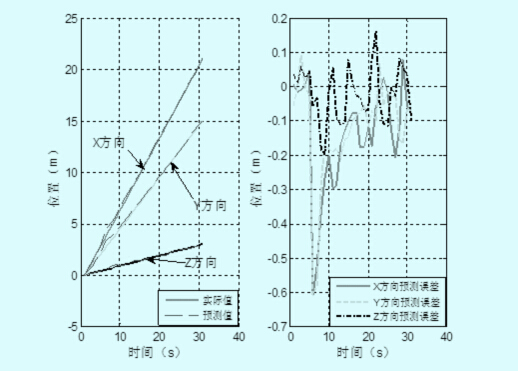
图2 匀速运动位置信息预测及其误差预测
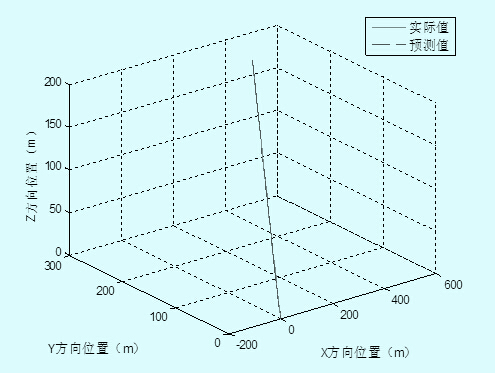
图3 匀速运动轨迹预测
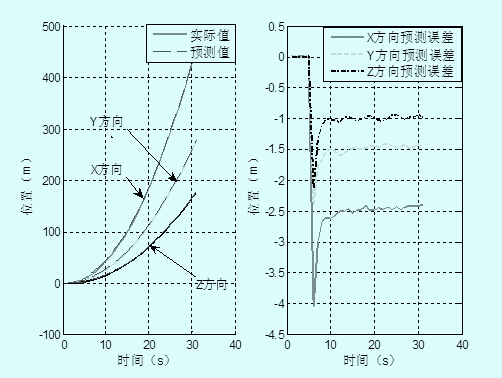
图4 匀加速运动位置信息预测及其误差预测
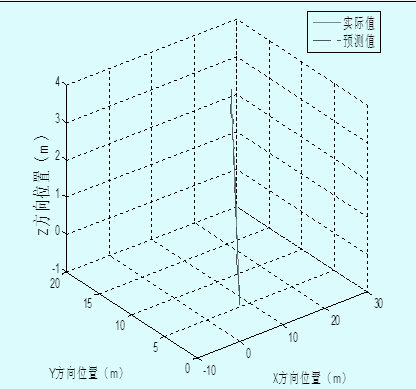
图5 匀加速运动轨迹预测
图2是目标在做匀速运动时,根据传感器得到的初始数据,进行了预测比较。如图所示:实线表示目标运动的实际值,虚线表示预测的结果。各坐标轴方向的预测曲线与实际的运动曲线几乎重合,因此得到了较好的预测效果,因为考虑到目标运动不是理想的情况,引入了高斯白噪声,误差范围在+0.15m--0.6m之间。图3为匀速运动轨迹预测,图中实线为目标实际轨迹,虚线为预测轨迹,因为目标运动的轨迹很规范,可以看出只有较小的偏差,满足目标跟踪的要求。图4为目标进行匀加速运动时的位置信息预测,因为X轴方向加速度相对最大,所以该方向预测的偏差最大。图5为匀加速运动的轨迹预测,预测效果略有偏差。
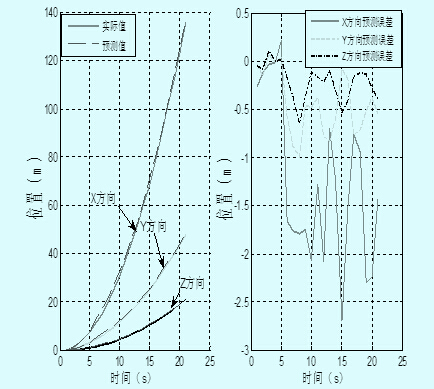
图6为目标进行变加速运动时的位置信息预测,
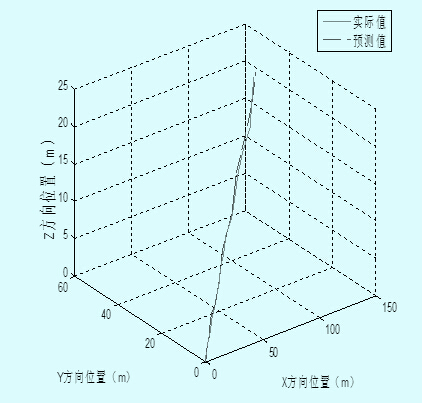
图7为目标进行变加速运动的轨迹预测,通过预测值与实际值之间的比较可以看出较前面两种简单运动的预测效果差。
图6为目标进行变加速运动时的位置信息预测,因为X方向目标进行的是变加速运动,预测的偏差较大,达到了2m左右,但是总体的预测趋势是较为准确的。
图7为目标进行变加速运动的轨迹预测,通过预测值与实际值之间的比较可以看出较前面两种简单运动的预测效果差。
5 结束语
本文在详细介绍了灰色动态预测原理的基础上,给出运用其进行UUV目标跟踪控制中的预测的方法和流程,最后对目标进行匀速、匀加速、变加速几种典型运动进行了仿真研究。仿真结果表明了该方法可以准确预测出目标的位置和轨迹信息,利用灰色动态预测进行目标跟踪控制中的预测具有不需要解析模型、小样本预测、预测准确、预测误差小等优点。其不足是:对突发性运动不能进行准确预测,易因而可以将该方法与其他预测方法相结合,用于解决UUV目标跟踪控制中的预测问题。
参考文献:
[1] 龙英睿.空间动目标预测跟踪研究[D].西安电子科技大学,硕士论文,2007.1
[2] 苏虹.未知环境下移动机器人运动目标检测与跟踪系统的研究[D].中南大学硕士论文,2005.4
[3] QinetiQ,Farnborough,UK.Target tracking:introduction and kalman tracking filters[J].IEE Algorithms and Applications.2001,19(2):13-16
[4] 徐瑜,杨绍清,孙牧.最小二乘滤波在目标跟踪中的应用[J].指挥控制与仿真.2007,29(4)