
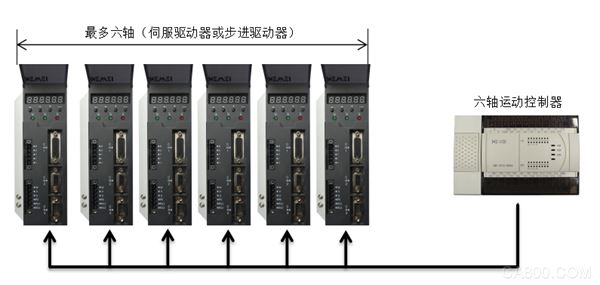
一、六轴运动控制器特点
针对伺服或步进电机驱动器,规划运动任务的高效工位型控制器,可进行六轴单动或联动,多用于定位和同步控制,同步控制包括电子齿轮同步和电子凸轮同步,及时处理高速事件(输入或输出),支持在线调节修正。
具备PLC功能。用梯形图编程,可进行输入/输出模块扩展,扩展模块与科威公司LP2系列的扩展模块全兼容。
自带运动记录的示波器功能,方便参数分析,优化运动过程。
二、六轴运动控制器功能简介
采用梯形图语言编程,以轴指令和轴参数方式向伺服驱动器、步进驱动器等功率驱动装置输出脉冲(最多六路)信号,完成单轴定位和多轴联动控制。用脉冲频率控制对象的移动速度,脉冲数控制对象的移动量。单轴脉冲频率最高600KHz,六轴同时运行各轴频率可达100KHz。六路脉冲输出端口采用差分电平,有利于频率较高时,抗扰性能好,接线距离长。
下面对六轴运动控制器的功能作简要综合介绍。
|
(一)、单轴定位
运动指令(插补指令IPL除外)驱动触点接通后,运动脉冲的演算周期为1ms,不受梯形图扫描时间影响。
|
|
指令名称
|
功能图示
|
简要说明
|
|
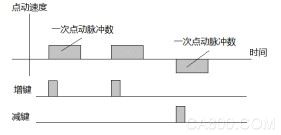
点动运行JOG
|
|
一次点动按设定速度匀速走完固定脉冲数。
用于微距离的精确校准使用。
|
|
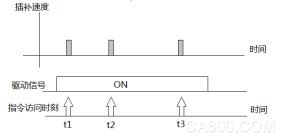
插补运行IPL
|
|
IPL指令受访问时间影响,访问一次(驱动触点闭合),插补一次,其插补量为1ms的脉冲数。
常用于相位修正。
|
|
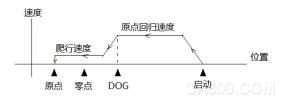
机械原点回零HOME
|
|
机械原点是系统工作的绝对参考点。
在此基础上,用户建立工作原点或工作坐标系。
从机械原点返回到工作原点,使用其他快速定位指令。
|
|
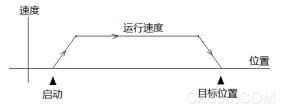
梯形定位
DDRVI/DDRVA/DPLSR
|
|
|
|
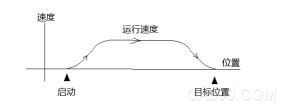
四次多项式曲线定位PSOUT
|
|
改善启动和停止的平稳性,减少机械振动和噪声,有助于延长机械寿命。
|
|
中断定位DDVIT
|

|
运行过程中,检测到中断信号时,移动一段设定位移后停止。
|
|
表格输出定位PTOUT
|

|
表格数据来源:
1、由PTAB指令制作。
2、辅助绘图软件制作。
3、从预制的表格库中调用。
|
|
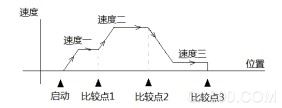
任意多段速定位DPLSV/DPLSY
|
|
1、由高速比较指令DHSCS进行速度变更。
2、由高 速表格比较指令DHSCT进行多段速变更。
|
|
(二)、轴关联定位
以一个轴(主轴)的位移作为参考(x),另外的轴(从轴)按设定的关系进行位置移动(y),用关系式表示 。 。
主轴可以是:①外部脉冲输入端口(如高速计数器);②控制器的脉冲输出端口(包含实际脉冲输出端口AXOUT0----AXOUT5和存储器脉冲输出端口AXOUT6---AXOUT8);③程序设置的数字输出(如每ms输出脉冲数)。
从轴是控制器的脉冲输出端口。
一个主轴可以连接多个从轴,但一个从轴只能有一个主轴。
一个从轴又可以成为下一级的主轴(级联)。
|
|

|
|
虚拟轴AXV0----AXV5:系统以每ms的节拍读取输入数据,按指令功能计算,输出计算结果。计算结果可由①实输出轴AXOUT0---AXOUT5转化成脉冲输出;②数字输出轴AXOUT6---AXOUT8作为中间引用值存储;③作为次级运动主轴的运行数据。
脉冲输出轴AXOUT0---AXOUT5:将虚拟轴的计数结果转化成脉冲,并经过脉冲端口对外输出并进行计数。脉冲端口在本控制器设计成差分输出型式。
|
|
主从关系 的具体表达: 的具体表达:
1、数学表达式:
|
 ; ;
电子齿轮指令GEAR是实现比例控制的运动控制指令。
|
|

|
|

|
|
......
|
2、表格表达:
表格点数:N+1
|
主轴
|
0
|
1dx
|
2dx
|
......
|
(N-1)dx
|
N dx
|
|
从轴
|
Y0=Y0
|
Y1=Y0+dy1
|
Y2=Y1+dy2
|
......
|
Y(N-1)=Y(N-2)+dy(N-1)
|
Y(N)=Y(N-1)+dy(N)
|
一般情况下,从轴初始位置坐标Y0=0;但也有初始坐标为最大的情况,如.
表格可以用来描述包含数学表达式在内的任意周期性单值对应关系。
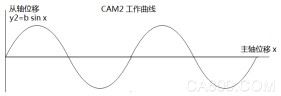
凸轮指令CAM是以表格为基础的运动控制指令。
|
|
与关联运行的运动指令有电子齿轮指令GEAR和凸轮指令CAM。为方便使用提供了相关辅助指令。
|
|
指令名称
|
功能图示
|
简要说明
|
|
电子齿轮指令GEAR
|
|
通常所指的两轴直线插补。
电子齿轮可以在线修改。
与表格比较指令DHSCT配合使用,可以在定点处修改电子齿轮比。
|
|
电子凸轮指令CAM
|

|
1、用表格来描述主从运动关系的指令。制表辅助指令有PCTAB,PBTAB,PTAB。
2、凸轮指令是主轴位移的周期指令,一个周期内可以设置<=128个比较点的16个位软元件输出。
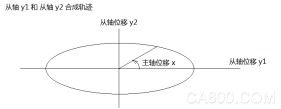
3、以主轴为媒介,多个从轴位移可以合成圆(或椭圆),螺旋线等轨迹。
4、单一凸轮指令多应用于滚切和追剪等定长裁切。
|
|
|
|
|
|
(三)、运动的复合
在不同轴上分别描述的运动过程,在一个轴上进行迭加输出或者是接续输出。
|
|
1、运动的迭加
|
|
独立运动过程
|
复合运动过程
|
|
|

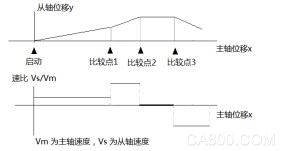
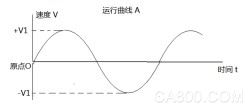
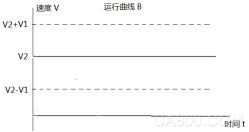
说明:
主轴速度通常是从轴在交会点处应该达到的速度。从轴在一个周期节拍内要求的平均速度是V2。有时需要升速到达同步速(V=V2+V1),有时需要降速达到同步速(V=V2-V1)。
|
|
|
|
|
|
|
2、运动的接续
|
|
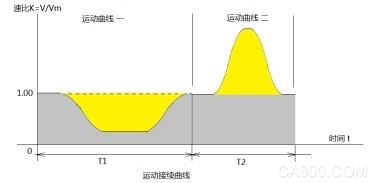
运动过程一
Vm为主轴速度,对应速比线恒为1。
曲线描述的是从轴速度与主轴速度的速比。该过程从轴脉冲数小于主轴脉冲数,对应滚切过程中是长料。

|
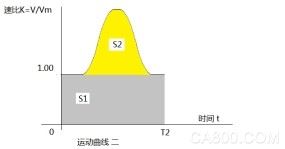
运动过程二
该过程从轴脉冲数大于主轴脉冲数,对应滚切过程中是短料。
|
|
运动一和运动二的接续运行过程
在生产过程中,经常出现长、短料在一条包装线上进行包装。因此系统根据物料的测量长度,更换与之对应的包装凸轮,两个不同长度的物料之间的运行过程切换,就是运行接续的例子。
|
|
|
|
|
3、实现复合运动的参数配置指令AXPO
虚拟轴:
共有六个虚拟轴(AXV0-----AXV5), 负责运动指令的解析计算,按1 ms 节拍输出计算结果,其输出结果只能连接到一个输出轴。将一个虚拟轴重新连接到一个新的实轴上,原有的连接即被断开。一般情况下,在梯形图首个扫描周期,一次性连接固定,即完成端口分配。
输出轴:
共有六个外部端子接口的脉冲输出轴(AXOUT0----AXOUT5)和三个内存接口的数字输出轴(AXOUT6------AXOUT8)。
数字输出轴作中间轴使用。
外接脉冲输出轴将虚拟轴的计算值按1 ms节拍转化成脉冲,供伺服驱动器位置(或速度)控制使用。
一个输出轴可以同时连接多个虚拟轴。正因为如此,运动控制器才具备复合运动的功能。
默认连接示意图: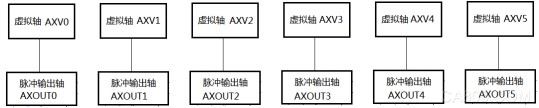
配置连接示意图:

图示中AXOUT1(外接端口Y1)复合了AXV0+AXV1+AXV2的运动功能。
AXOUT4(外接端口Y4)复合了AXV3+AXV4+AXV5的运动功能。
未连接AXV的脉冲输出轴可作为通用的输出端口供梯形图编程使用,如AXOUT0等效于Y0。
|