【摘要】目前在生产线上的搬运工业机器人大都是通过预先编程,并按固定的路径执行动作,目标物体的初始位置和目标位置都是固定的,机器人只是完成点到点的动作。而对于拾取输送线上位置不确定的物体如面包,袋装食品等物体,沿固定轨迹运行的机械手就无能为力了。为保证搬运工业机器人顺利完成这类在线拾放的工作任务,需引入视觉进行识别定位,引导工业机器人完成对工件的拾取和放置等操作。使用视觉引导的机械手在动作执行速度,放置精度和重复稳定性方面都较人工有很大优势。
【Abstract】In order to ensure handling industrial robot to complete this kind of online pick up put tasks, it is necessary to introduce visual identification orientation.By using visual guide ,it will have a lot of advantage,such as stability.
【关键词】机器视觉;机械手;降低成本
【Keywords】machine vision;manipulator;ciost-saving
传统袋装食品生产线或陶瓷生产线上都配有大量的工人来收集传送带上的成品,然后放置到托盘上,不仅工人的劳动强度大,而且企业要使用大量人手工作,也增加了人力资源的成本。为此,我们设计了一个机械手自动拾放系统来满足这类厂家的生产需要。
1 系统概况
系统由台达DMV系列视觉传感器与卡诺普公司的机械手配合,通过以太网通讯的方式,把检测数据传送到机械手系统,并由机械手实现目标物体的拾放
2 系统设备配置
2.1 系统设备简介
根据产品生产的要求,从经济性和系统可靠性的角度出发,选择控制系统的元器件。
机器视觉系统可选择台达DMV1000控制器,拥有80万像素摄像头,25mm 百万像素级别镜头,以及红色LED环形光源。
2.2 台达DMV1000视觉控制器特点
台达DMV1000视觉控制器特点有以下几点:
(1)内建操作系统,小型化体积,无需搭配PC操作;
(2)流程化操作接口,降低使用者设定上的复杂度;
(3)提供多样检测功能,满足大部份应用需求;
(4)工业级设计,符合于震动、高温等生产环境;
(5)支持双摄影机同步检测 (80万画素之1394a摄影机);
(6)I/O、RS232、Ethernet、USB等多样外部通讯方式;
(7)SD 记忆卡储存装置;
(8)提供操作器及PC软件设定接口;
目前DMV产品已拥有大量的图形工具,包括面积测量、边缘位置、边缘计数、边缘宽度、边缘节距、边形比对、边缘角度、斑点侦测、影像强度、污点检测、边缘追踪及宽度追踪。其检测系统使用了专用的视觉LED光源,主要有三大特点。实现,使用寿命长,一万到三万小时左右。如果选用频闪的功能,LED寿命将更长,而且LED的通断速度快,可在10微秒达到最大亮度;其次,LED有不同的颜色不同的波长,用户可以根据检测对象的特征选用不同波长的光源,以突出检测特征从而达到理想的效果;最后,稳定性好,LED灯采用直流供电,克服了交流供电时出现的工频频闪现象,保持了获取图像的一致性。图1为系统控制图。
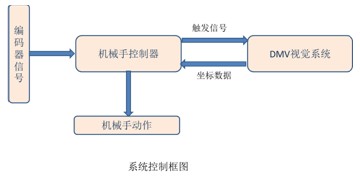
图1 系统控制图
如图2所示,当目标物体从流水线出来,以随机的姿态进入机器视觉的视野后,由上位机触发视觉系统进行取像,然后把图像信息传输给图像处理器GPU。通过图像处理器的运算,计算出产品的重心位置(XY坐标和角度θ),下图显示出机器视觉检测出视野里出现了7个目标物体,这7个物体的位置数据将通机器视觉自带的通讯口与上位机进行通讯,最后由上位机发送指令给机械手执行动作。
此外,台达DMV产品还支持RS232/RS485、Ethernet(10BASE-T)和台达DVP PLC-Link等通讯方式。市面上几家大的机械手厂家包括ABB、KUKA以及Staubli均支持DMV的通讯接口。经过程序优化,机械手的抓取速度可达到200个/分钟,定位误差小于0.5mm,角度误差小于1°。
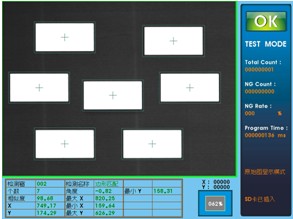
图2 机器视觉图像显示图
2.3 技术性能及系统参数
检测内容:产品中心的XY位置及角度θ
通讯方式:通过以太网发送产品的位置数据到上位机(PLC,工控机)
FOV(检测视野):200×150mm
WD(工作距离):800mm
3 DMV控制系统设计
作为位置测量系统的DMV,除供电电源外,触发信号和位置坐标值输出都是通过以太网口与上位机进行通讯,图3为DMV的接线端子图。

图3为DMV的接线端子图
台达DMV视觉系统支持modbus TCP/IP,现以Trigger来:在RS485时,当输入命令【:010610000001E8 CR LF】时,DMV会执行trigger检测动作。
图4为机械手与DMV通讯的参考代码,其中机械手触发DMV和读取x坐标指令,y和角度的略去。

图4 机械手与DMP通讯的参考代码
5 结束语
该检测系统经过合适的选型、较好的硬件配置及完善的程序设计,完全满足用户要求。此外,该系统还具备以下几个特点:首先,加工生产效率高(大约每秒钟拾取3个产品);其次,灵活性好,通过简单的视教动作,即可实现多种不同规格产品的检测;第三,大大减轻工人劳动强度。
随着国内人力成本的增长以及加工企业对品质,产能要求的不断提升,对机器视觉系统介入生产领域取代人工进行测量,检测的需求将呈现出快速增长的趋势。据统计,欧美日等发达国家制造业的机器人使用率较10年前有近10倍的增幅。实际上,在精密电子行业,使用机器视觉,机械手进行产品尺寸测量,外观检测,对位等应用已非常成熟,在一些高精度的对位应用里,机器视觉产品的测量精度已大大超载人工检测的分辨率和精度。
作者简介:
李景昌,出生1974年,毕业于广东工业大学 自动控制专业。现任中达电通股份有限公司高级视觉应用工程师,从事台达机器视觉产品在国内的应用推广。
